Agentic AI Certification Training Course
- 135k Enrolled Learners
- Weekend/Weekday
- Live Class
(63442)





 Copy Link!
Copy Link!A Variational Autoencoder (VAE) is a type of generative model that learns to make new data by modeling the probability distribution of the data it is given. The standard autoencoder uses a neural network to turn input data into a fixed-size code and then read it back. This is an addition to that code. A VAE, on the other hand, doesn’t just make a fixed model of the latent data; instead, it maps the input data to a probabilistic distribution (usually Gaussian) in the latent space.
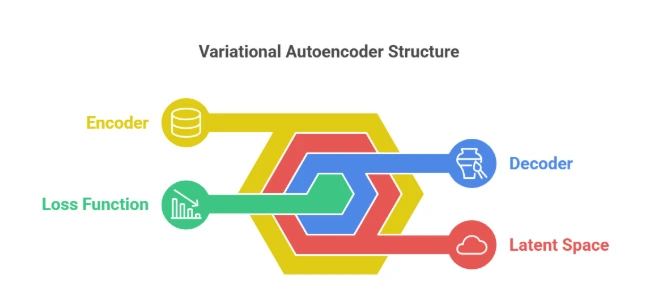
The VAE consists of two main components:
The VAE is trained by maximizing a variational lower bound on the data likelihood, which combines:
The VAE enables the generation of new, realistic data by sampling from the learned latent space, making it highly useful for tasks such as image generation, anomaly detection, and data synthesis.
The Encoder, the Latent Space, and the Decoder are the three main parts that make up the design of a Variational Autoencoder (VAE). Each part is very important for learning how the data is likely to be represented and making new samples that are similar.
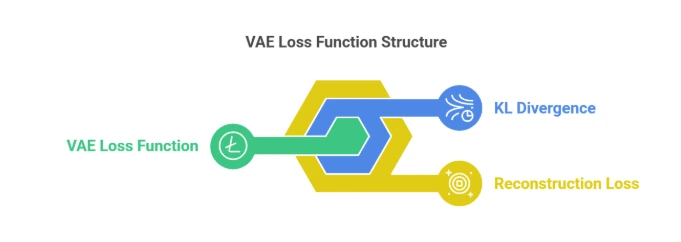
The VAE is trained using a loss function that consists of two terms:
The total VAE Loss is the sum of the reconstruction loss and the KL divergence:
LVAE=Lrecon+LKLmathcal{L}_{text{VAE}} = mathcal{L}_{text{recon}} + mathcal{L}_{text{KL}}
The VAE can learn a structured, continuous latent space with this architecture. This is helpful for creating new data, finding anomalies, and other jobs that need creating data.
Regularization in VAEs makes sure that the latent space is represented in a meaningful way, which helps the learned model be smooth and general. It’s possible to divide perception into three main parts:
 Balancing Reconstruction and Distribution Alignment:
Balancing Reconstruction and Distribution Alignment: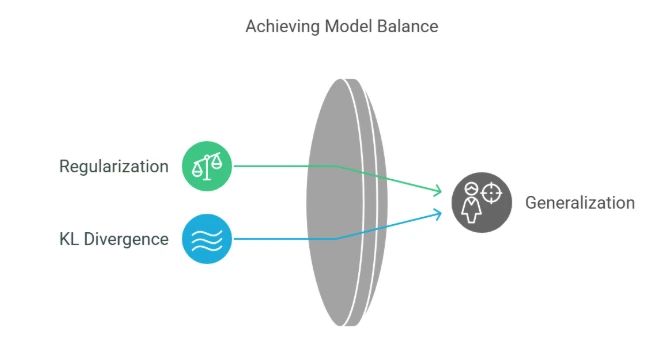
This balance keeps the model from just remembering the data and encourages a structured latent space that can hold important differences.
Regularization ensures that:
To sum up, regularization helps find a balance between learning from the data and sticking to a probabilistic structure. This is important for making sure that generative modeling in VAEs is stable and easy to understand.
Variational Autoencoders (VAEs) are probabilistic generative models that learn a hidden representation and then use it to make new data points that are similar to the training data. The mathematical framework is broken down below:
The goal of a VAE is to maximize the likelihood p(x)p(x) of the data xx, which is achieved by optimizing the evidence lower bound (ELBO). This involves latent variables zz:
p(x)=∫p(x,z) dzp(x) = int p(x, z) , dz
Since this integral is intractable, VAEs optimize the ELBO:
LELBO=Eq(z∣x)[log⁡p(x∣z)]−KL(q(z∣x)∥p(z))mathcal{L}_{text{ELBO}} = mathbb{E}_{q(z|x)}[log p(x|z)] – text{KL}(q(z|x) | p(z))
Since p(z∣x)p(z|x) is intractable, VAEs approximate it using a parametric distribution q(z∣x)q(z|x), often modeled as:
q(z∣x)∼N(μencoder,σencoder2I)q(z|x) sim mathcal{N}(mu_{text{encoder}}, sigma_{text{encoder}}^2 I)
The encoder network outputs μencodermu_{text{encoder}} and σencodersigma_{text{encoder}}, representing the mean and variance of this Gaussian distribution.
To backpropagate through q(z∣x)q(z|x), the reparameterization trick is used:
z=μencoder+σencoder⊙ϵ,ϵ∼N(0,I)z = mu_{text{encoder}} + sigma_{text{encoder}} odot epsilon, quad epsilon sim mathcal{N}(0, I)
This changes the random picking into a deterministic process, which lets it be differentiable.
The ELBO is minimized as:
LVAE=Reconstruction Loss+KL Divergencemathcal{L}_{text{VAE}} = text{Reconstruction Loss} + text{KL Divergence}
In practice:
LVAE=−Eq(z∣x)[logp(x∣z)]+β⋅KL(q(z∣x)∥p(z))mathcal{L}_{text{VAE}} = -mathbb{E}_{q(z|x)}[log p(x|z)] + beta cdot text{KL}(q(z|x) | p(z))
where βbeta is a hyperparameter controlling the trade-off between reconstruction and regularization.
The decoder maps latent variables zz back to the data space xx:
p(x∣z)∼N(μdecoder,σ2I)p(x|z) sim mathcal{N}(mu_{text{decoder}}, sigma^2 I)
This is modeled using a neural network.
The encoder maps data xx to the latent space zz by producing parameters μencodermu_{text{encoder}} and σencodersigma_{text{encoder}}:
q(z∣x)∼N(μencoder,σencoder2I)q(z|x) sim mathcal{N}(mu_{text{encoder}}, sigma_{text{encoder}}^2 I)
This mathematical framework makes it possible for VAEs to find a good mix between reconstruction quality and a well-structured latent space. This lets data be generated and interpolated in a meaningful way.
Neural networks are used a lot in variational autoencoders (VAEs) to describe the encoder and decoder parts. The jobs of these neural networks are to put data into a latent space (encoding) and get data back from the latent space (decoding). Here is a list of their functions and roles:
class Encoder(nn.Module):
def __init__(self, input_dim, latent_dim):
super(Encoder, self).__init__()
self.fc1 = nn.Linear(input_dim, 128)
self.fc_mu = nn.Linear(128, latent_dim)
self.fc_logvar = nn.Linear(128, latent_dim)
def forward(self, x):
h = F.relu(self.fc1(x))
mu = self.fc_mu(h)
logvar = self.fc_logvar(h)
return mu, logvar
class Decoder(nn.Module):
def __init__(self, latent_dim, output_dim):
super(Decoder, self).__init__()
self.fc1 = nn.Linear(latent_dim, 128)
self.fc_out = nn.Linear(128, output_dim)
def forward(self, z):
h = F.relu(self.fc1(z))
x_reconstructed = torch.sigmoid(self.fc_out(h))
return x_reconstructed
class VAE(nn.Module):
def __init__(self, input_dim, latent_dim):
super(VAE, self).__init__()
self.encoder = Encoder(input_dim, latent_dim)
self.decoder = Decoder(latent_dim, input_dim)
def forward(self, x):
mu, logvar = self.encoder(x)
std = torch.exp(0.5 * logvar)
z = mu + std * torch.randn_like(std) # Reparameterization
x_reconstructed = self.decoder(z)
return x_reconstructed, mu, logvar
To train the VAE, the total loss is kept as low as possible:
LVAE=Lreconstruction+LKLmathcal{L}_{text{VAE}} = mathcal{L}_{text{reconstruction}} + mathcal{L}_{text{KL}}
optimizer = torch.optim.Adam(vae.parameters(), lr=1e-3)
for epoch in range(num_epochs):
for x in dataloader:
x_reconstructed, mu, logvar = vae(x)
reconstruction_loss = F.binary_cross_entropy(x_reconstructed, x, reduction='sum')
kl_loss = -0.5 * torch.sum(1 + logvar - mu.pow(2) - logvar.exp())
loss = reconstruction_loss + kl_loss
optimizer.zero_grad()
loss.backward()
optimizer.step()
There are several steps needed to run a Variational Autoencoder (VAE), such as defining the design, training the model, and evaluating it. Here is an organized outline of how to carry out a VAE:
Install the necessary libraries:
pip install torch torchvision matplotlib
Import required packages:
import torch import torch.nn as nn import torch.optim as optim from torch.utils.data import DataLoader from torchvision import datasets, transforms import matplotlib.pyplot as plt
The encoder maps the input data xx to the latent space zz:
class Encoder(nn.Module):
def __init__(self, input_dim, latent_dim):
super(Encoder, self).__init__()
self.fc1 = nn.Linear(input_dim, 128)
self.fc_mu = nn.Linear(128, latent_dim)
self.fc_logvar = nn.Linear(128, latent_dim)
def forward(self, x):
h = torch.relu(self.fc1(x))
mu = self.fc_mu(h)
logvar = self.fc_logvar(h)
return mu, logvar
The decoder reconstructs xx from the latent variable zz:
class Decoder(nn.Module):
def __init__(self, latent_dim, output_dim):
super(Decoder, self).__init__()
self.fc1 = nn.Linear(latent_dim, 128)
self.fc_out = nn.Linear(128, output_dim)
def forward(self, z):
h = torch.relu(self.fc1(z))
x_reconstructed = torch.sigmoid(self.fc_out(h))
return x_reconstructed
Combine the encoder and decoder:
class VAE(nn.Module):
def __init__(self, input_dim, latent_dim):
super(VAE, self).__init__()
self.encoder = Encoder(input_dim, latent_dim)
self.decoder = Decoder(latent_dim, input_dim)
def forward(self, x):
mu, logvar = self.encoder(x)
std = torch.exp(0.5 * logvar)
z = mu + std * torch.randn_like(std) # Reparameterization trick
x_reconstructed = self.decoder(z)
return x_reconstructed, mu, logvar
The VAE loss includes both reconstruction loss and KL divergence:
def vae_loss(x, x_reconstructed, mu, logvar):
reconstruction_loss = nn.functional.binary_cross_entropy(x_reconstructed, x, reduction='sum')
kl_loss = -0.5 * torch.sum(1 + logvar - mu.pow(2) - logvar.exp())
return reconstruction_loss + kl_loss
Use a dataset such as MNIST:
transform = transforms.Compose([transforms.ToTensor(), transforms.Lambda(lambda x: x.view(-1))]) mnist = datasets.MNIST(root='./data', train=True, download=True, transform=transform) dataloader = DataLoader(mnist, batch_size=64, shuffle=True)
input_dim = 28 * 28 # For MNIST
latent_dim = 10
vae = VAE(input_dim, latent_dim)
optimizer = optim.Adam(vae.parameters(), lr=1e-3)
for epoch in range(10):
total_loss = 0
for x, _ in dataloader:
x_reconstructed, mu, logvar = vae(x)
loss = vae_loss(x, x_reconstructed, mu, logvar)
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_loss += loss.item()
print(f"Epoch {epoch + 1}, Loss: {total_loss / len(dataloader.dataset):.4f}")
vae.eval()
with torch.no_grad():
for x, _ in dataloader:
x_reconstructed, _, _ = vae(x)
break
x = x.view(-1, 28, 28)
x_reconstructed = x_reconstructed.view(-1, 28, 28)
fig, axes = plt.subplots(1, 2, figsize=(10, 5))
axes[0].imshow(x[0].cpu(), cmap='gray')
axes[0].set_title("Original Image")
axes[1].imshow(x_reconstructed[0].cpu(), cmap='gray')
axes[1].set_title("Reconstructed Image")
plt.show()
Visualize the latent space for 2D latent variables:
latent_dim = 2
vae = VAE(input_dim, latent_dim)
# Train the VAE first
with torch.no_grad():
z = []
labels = []
for x, y in dataloader:
mu, _ = vae.encoder(x)
z.append(mu)
labels.append(y)
z = torch.cat(z).cpu().numpy()
labels = torch.cat(labels).cpu().numpy()
plt.scatter(z[:, 0], z[:, 1], c=labels, cmap='tab10', s=5)
plt.colorbar()
plt.title("Latent Space Visualization")
plt.show()
This process shows how to run a VAE from the description stage to the visualization stage.
Visualizing the latent space of a Variational Autoencoder (VAE) provides insights into how the model organizes data in its compressed representation. Here’s a step-by-step guide to perform latent space visualization:
You need a trained VAE with a 2D latent space (for easy visualization).
Use the encoder to extract latent space embeddings for a dataset.
import matplotlib.pyplot as plt
import torch
# Function to extract latent space embeddings
def extract_latent_space(vae, dataloader):
vae.eval()
z = []
labels = []
with torch.no_grad():
for x, y in dataloader:
mu, _ = vae.encoder(x)
z.append(mu)
labels.append(y)
z = torch.cat(z).cpu().numpy()
labels = torch.cat(labels).cpu().numpy()
return z, labels
Plot the 2D latent space using a scatter plot.
# Extract latent embeddings
z, labels = extract_latent_space(vae, dataloader)
# Plot the latent space
plt.figure(figsize=(8, 6))
scatter = plt.scatter(z[:, 0], z[:, 1], c=labels, cmap='tab10', s=10)
plt.colorbar(scatter, label="Class Label")
plt.title("Latent Space Visualization")
plt.xlabel("Latent Dimension 1")
plt.ylabel("Latent Dimension 2")
plt.grid()
plt.show()
Grid-sample the latent space and decode for visualization.
import numpy as np
# Generate grid points
grid_x = np.linspace(-3, 3, 20)
grid_y = np.linspace(-3, 3, 20)
grid = torch.tensor([[x, y] for x in grid_x for y in grid_y], dtype=torch.float)
# Decode grid points to images
vae.eval()
with torch.no_grad():
generated = vae.decoder(grid).view(-1, 28, 28).cpu()
# Visualize reconstructed grid
fig, axes = plt.subplots(len(grid_x), len(grid_y), figsize=(10, 10))
for i, ax_row in enumerate(axes):
for j, ax in enumerate(ax_row):
ax.imshow(generated[i * len(grid_y) + j], cmap="gray")
ax.axis("off")
plt.tight_layout()
plt.show()
This way of looking at latent spaces blends being able to interpret and being creative.
Variational Autoencoders (VAEs) are powerful generative models that learn to represent input data in a probabilistic latent space and generate new, similar samples from it. While the basic VAE architecture is foundational, multiple types and variants of VAEs have emerged to handle different tasks, improve generative quality, or model more complex distributions.
Let’s explore the key types of VAEs and how they differ.
This is the original and most common form of a VAE.
Use cases: Image generation, anomaly detection, data compression.
Limitations: Generated outputs may be blurry; assumes a simple Gaussian latent space.
A Conditional VAE learns to generate data conditioned on some auxiliary information such as labels or categories.
Example:
# During training encoder_input = tf.concat([x, y], axis=1) decoder_input = tf.concat([z_sample, y], axis=1)
Use cases: Style transfer, text-to-image generation, guided synthesis.
Introduces a β hyperparameter to control the trade-off between reconstruction accuracy and latent space disentanglement.
Key benefit: Encourages disentangled representations—different latent variables learn to represent different factors (e.g., object shape, size, orientation).
Use cases: Interpretable generative models, unsupervised feature learning.
VQ-VAEs use discrete latent variables instead of continuous ones.
Advantages:
Uses multiple layers of latent variables to model complex data distributions.
Use cases: Complex image and video generation, hierarchical text modeling.
Instead of using a Gaussian distribution in the latent space, these models use categorical or discrete latent variables.
Use cases: Clustering, symbolic reasoning, structured data generation.
These VAEs handle both labeled and unlabeled data during training.
Use cases: Scenarios with limited labeled data, such as medical imaging or text classification.
Trains the model to reconstruct clean data from noisy inputs, increasing robustness.
Use cases: Image denoising, noise-robust generation.
Variational Autoencoder vs Traditional Autoencoder
Autoencoders are neural networks that learn to compress data into a lower-dimensional representation (encoding) and then reconstruct it back to its original form (decoding). However, not all autoencoders are the same. The Traditional Autoencoder and the Variational Autoencoder (VAE) differ fundamentally in their architecture, purpose, and capabilities.
| Feature | Traditional Autoencoder | Variational Autoencoder (VAE) |
| Main Goal | Dimensionality reduction or reconstruction | Generative modeling and data generation |
| Output Type | Best reconstruction of input | New data samples from learned distribution |
Traditional: Input → Encoded Vector → Output
VAE: Input → μ, σ → Sample z ~ N(μ, σ) → Output
This stochastic sampling in VAE allows it to generate diverse outputs even for similar inputs.
| Component | Traditional Autoencoder | VAE |
| Encoder Output | Latent vector | Mean and variance of distribution |
| Decoder Input | Latent vector | Sampled vector from the distribution |
| Sampling Step | Not applicable | Uses reparameterization trick |
Here’s a simplified PyTorch-style snippet showing the difference in encoder output:
Traditional Autoencoder:
latent = encoder(x) # Direct encoding
output = decoder(latent)
Variational Autoencoder:
mu, logvar = encoder(x) # Learn distribution parameters
std = torch.exp(0.5 * logvar)
z = mu + std * torch.randn_like(std) # Reparameterization trick
output = decoder(z)
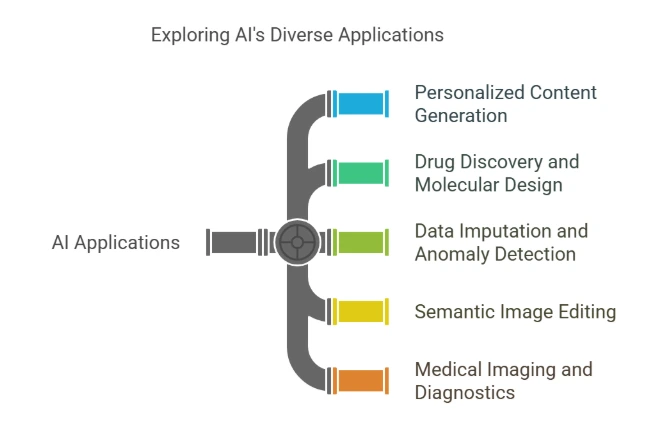 Personalized Content Generation
Personalized Content GenerationVAEs, which combine deep learning with statistical frameworks to model complex data distributions quickly and accurately, have become a powerful tool in generative modeling. They can work in a wide range of industries because they can produce high-quality outputs, learn useful latent representations, and adapt to different tasks. VAEs have a huge amount of potential for innovation, from making personalized content to medical diagnosis and drug finding. As study grows, combining VAEs with other cutting-edge technologies could open up new options. This would help AI applications move forward and make the future more creative, efficient, and smart. See how CycleGAN enables stunning image-to-image translation without paired datasets.
Generative AI enables machines to generate realistic content by analyzing data. A Gen AI certification equips learners with expertise in deep learning, neural networks, and AI-driven innovation, opening doors to advanced career opportunities in artificial intelligence.
1. What is the structure of a variational autoencoder?
VAE stands for Variational Autoencoder. It is a generative model with two main parts: an encoder and a decoder. Using probability, the encoder maps the input data into a hidden variable space (distribution). The decoder then uses the latent factors to put together the input data again. VAEs are different from regular autoencoders because they assume that the data comes from a distribution, usually a Gaussian one. This gives the hidden space a probabilistic structure.
2. What is the architecture of the variational autoencoder decoder?
Usually, a neural network is the decoder in a VAE. It gets the latent variables (sampled from the latent space) and puts together the original input data. The decoder’s design is the same as the encoder’s, but it works backward. It usually has layers, such as fully connected layers or convolutional layers for image data. It connects the hidden variable to the original data space using activation functions such as ReLU, Sigmoid, or Tanh, depending on the type of output (for example, continuous or binary data).
3. What is a variational autoencoder?
A Variational Autoencoder (VAE) is a type of deep learning model that learns to make new data by modeling the chance distribution of the data it is given. The standard autoencoder is built on top of this one, but this one learns to show the data as a distribution instead of a fixed code. The VAE uses a probabilistic method to make sure that the latent space is continuous and set up in a way that makes it possible to create new data points that are similar.
4. What are the components of a variational autoencoder?
Several important parts make up a Variational Autoencoder (VAE):
An encoder is a type of neural network that takes in data, maps it into a latent variable space, and then gives back the distribution’s mean and range.












 Thank you for registering Join Edureka Meetup community for 100+ Free Webinars each month JOIN MEETUP GROUP
Thank you for registering Join Edureka Meetup community for 100+ Free Webinars each month JOIN MEETUP GROUP